


 |
Product Introduction
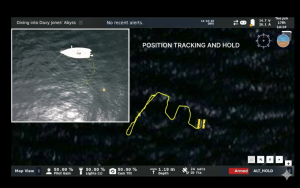
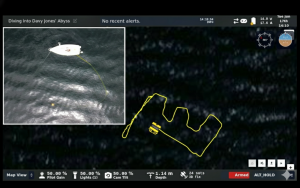
USBL Underwater Positioning – Real-Time Coordinate Tracking The ROV Locator Mk II is a portable positioning system specifically developed for small ROVs. The system consists of one Subsea Transmitter (mounted on the ROV) and one Surface Receiver. With a streamlined deployment process, operators can monitor the ROV's dynamic coordinates in real-time via the ground station’s map interface. ● Core Advantages: |


 |
 |
Product Comparison Table
| ROV Locator Ⅱ | ROV Locator Ⅲ | |
|---|---|---|
| Sync Technology | GNSS Satellite Sync | Acoustic Duplex Sync |
| Positioning Principle | Calculates time difference based on pre-aligned clocks at both ends. | Calculates two-way Time of Flight (ToF) of acoustic signals. |
| Pre-Dive Prep | GPS signal acquisition required at the surface before diving. | No sync required; true plug-and-play upon power-up. |
| Accuracy Stability | Subject to clock drift (approx 1 m/h). | Zero drift; accuracy remains constant over time. |
| Mission Duration | Requires periodic recovery to the surface for re-sync. | Supports unlimited underwater operation time. |
| System Integration | High; requires clear line-of-sight for GNSS antennas. | Ultra-high; simpler installation with a more compact form factor. |
| Multi-Device Compatibility | Minimal restrictions. | Limited to one system per area. |
| Ideal Scenarios | Short-duration, budget-friendly routine missions. | Long-endurance deep-sea missions and professional scientific research. |




