


 |
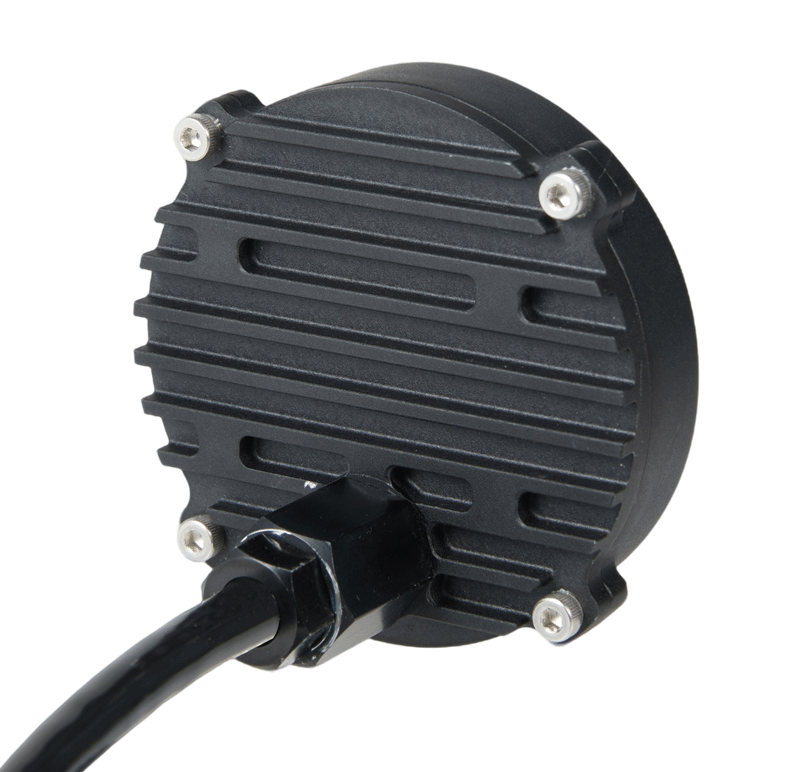
Product Introduction
Smart Vision, Redefined: Beyond Video Streams. Direct output of recognition results instead of just video streams ● Metadata Intelligence: Direct output of recognition metadata, minimizing data bandwidth. |
● Direct Visual Feature Output
● Computing Decoupling
● Rapid Integration and Deployment of ROV Vision Modules
Main Specifications
| Depth Rating | 300 m |
| Weight in Air | Water | 0.3 kg | 0.15 kg |
| Camera Model | OAK-1-W |
| Image Sensor | IMX 378 |
| Field of View (FOV) | 120°D/95°H/70°V |
| Resolution | 12 MP (4032×3040) |
| Max Frame Rate | 60 FPS |
| Focal Length | 4.81 mm |
| Aperture | 2.8 ±5% |
| Focus Range | FF: 60 cm – ∞ |
| Lens Size | 1/2.3 inch |
| Pixel Size | 1.55µm x 1.55µm |
| Shutter Type | Rolling Shutter |
| Protocol | Ethernet |
| Power Supply | 5 or 12VDC, approx. 2.5W~3W |
| Packing List | AI-M Underwater Camera *1, Standard 2m seawater-resistant cable (Length customizable up to 70m, contact customer service for longer distances) |
| Software Dev | ROS / Python / C++ |
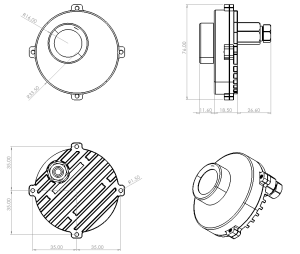
Main Dimensions
Wiring Instructions

| Grey | / |
| Grey/ White | / |
| Blue | GND |
| Blue/White | +5VDC (Camera Power) |
| Green | DATA- |
| Green/White | DATA+ |
| Orange | / |
| Orange/White | / |
Underwater Cameras Model Selection Guide
| Resolution | Zoom | Power | Communication | Target Recognition | Depth Perception | |
|---|---|---|---|---|---|---|
| Rpi AI Cam | 8MP | × | 12VDC / 15W | Ethernet | √
(Secondary Dev) |
× |
| GoPro | 27MP | × | 12VDC / 8W | Ethernet | × | × |
| AI-M | 12MP | × | 5 or 12VDC / 3W | Ethernet | √ | × |
| AI-D | 12MP | × | PoE / 5.5W | Ethernet | √ | √ |
| Zoom | 2.13MP | 30x Optical Zoom
12x Digital Zoom |
12VDC / 5.4W | BNC
(75Ω Coaxial) |
× | × |
| Vision
360° |
4MP | 4x Optical Zoom
16x Digital Zoom |
12VDC /
PTZ Camera: 10W Camera + 4 Lights: 60W |
Ethernet | × | × |






